


Introduction of research contents
연구내용 소개

86kg(@air)
CFRP (Frame)
AI 6061 (Housing)
24VDC(Li-ion Battery)
300m(max)
6 DoF
FWD/REV 16kgf
Vertical 26kgf
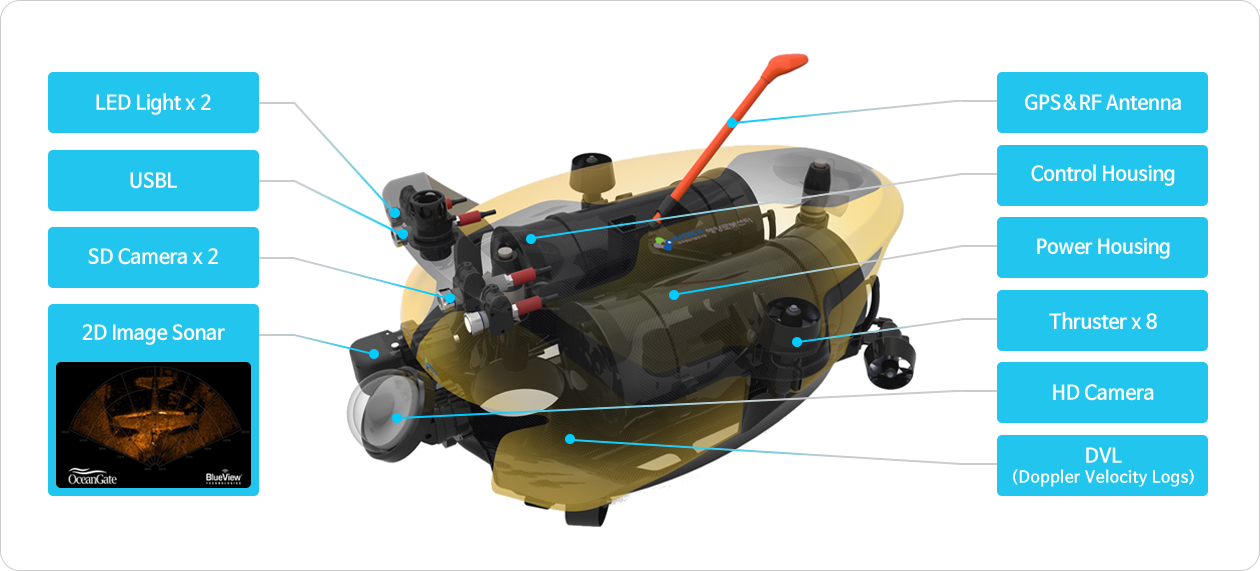
| Item | Model | Purpose |
|---|---|---|
| IMU | MTI-G-710 | Position & Attitude |
| DVL | Teledyne Pathfinder | Position |
| USBL | Blueprint Seatrac | Position & Communication |
| 2D Image Sonar | M900-130 | Monitoring, Obstacle Detection |
| Main Camera | LUXUS HD Camera | Monitoring |
| Thruster | Model 300 / Model 540 | Motion control |


160kg(@air)
CFRP (Frame)
AI 6061 (Housing)
330VAC
300m(max)
6 DoF
FWD/REV 55.9kgf
Vertical 100kgf
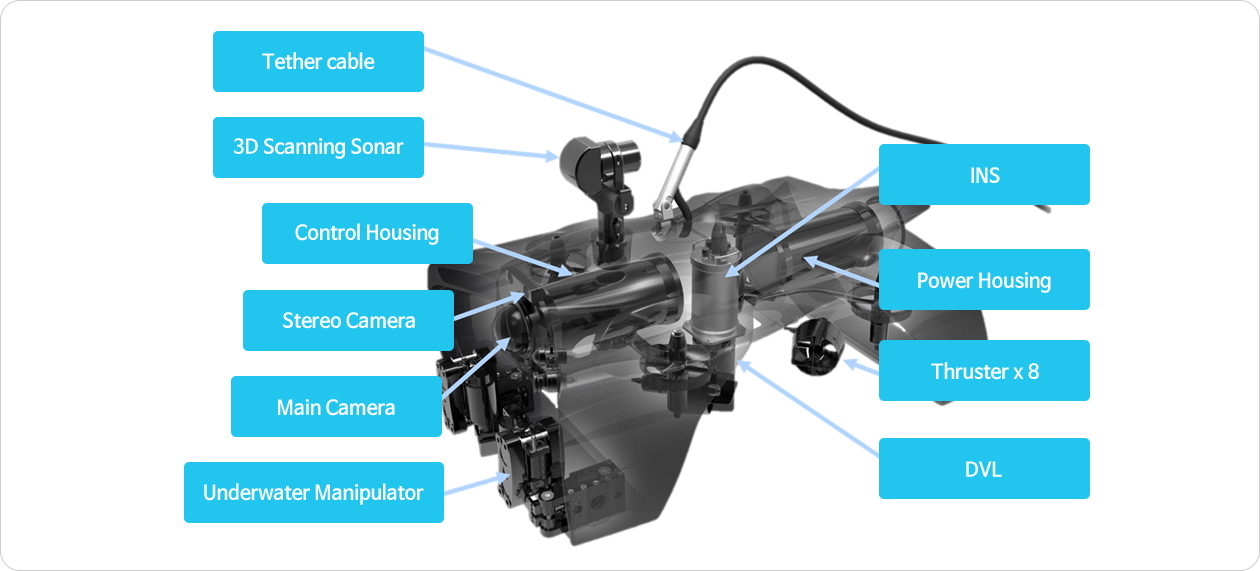
| Item | Model | Purpose |
|---|---|---|
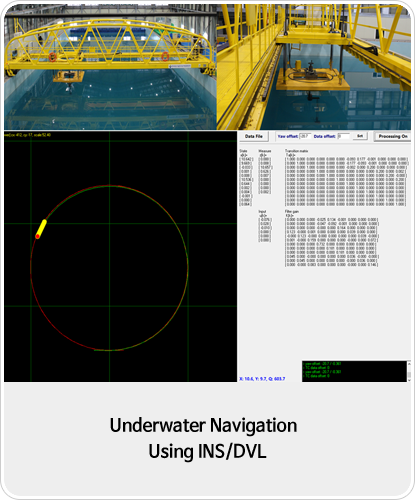
| INS | TOGSINS1 | Underwater Navigation |
| DVL | Pioneer 600 kHz | |
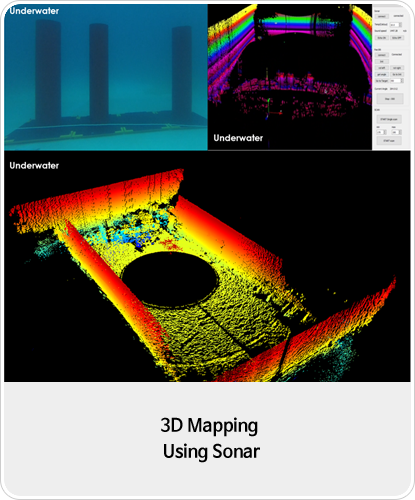
| 3D Scanning Sonar | BV5000-1350 | 3D mapping |
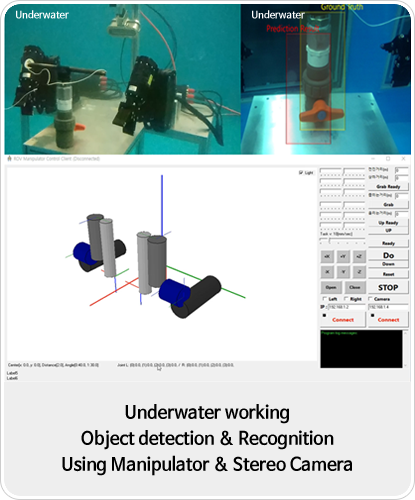
| Underwater Manipulator | ARM 5E Micro | Underwater working |
| Stereo Camera | ZED | Object Detection & Recognition |
| Main Camera | AXIS | Monitoring |
| Thruster | Model 1020 / Model 1040 | Motion control |

233kg(@air)
FRP (Frame)
24VDC(Li-ion Battery)
2 DoF
FWD 30kgf
WLAN(802.11ac)
| Item | Model | Purpose |
|---|---|---|
| IMU | PNI Targetpoint TCM | Position & Attitude |
| GPS | Septentrio(AsteRX-m2a) | Position |
| Stereo Camera | ZED 2i | Point Cloud |
| Main Camera | CNB NS2100MH/IP | Monitoring |
| MCU | PSOC CY8CKIT-59 | Conveyor& Thruster control |
| Embedded Board | Jetson Xavier AGX | Control Algorithm |
| Thruster | Protruar 1.0 | Motion control & Suction |

지능형 해양로봇 분야
86kg(@air)
CFRP (Frame)
AI 6061 (Housing)
24VDC(Li-ion Battery)
300m(max)
6 DoF
FWD/REV 16kgf
Vertical 26kgf
| Item | Model | Purpose |
|---|---|---|
| IMU | MTI-G-710 | Position & Attitude |
| DVL | Teledyne Pathfinder | Position |
| USBL | Blueprint Seatrac | Position & Communication |
| 2D Image Sonar | M900-130 | Monitoring, Obstacle Detection |
| Main Camera | LUXUS HD Camera | Monitoring |
| Thruster | Model 300 / Model 540 | Motion control |
160kg(@air)
CFRP (Frame)
AI 6061 (Housing)
330VAC
300m(max)
6 DoF
FWD/REV 55.9kgf
Vertical 100kgf
| Item | Model | Purpose |
|---|---|---|
| INS | TOGSINS1 | Underwater Navigation |
| DVL | Pioneer 600 kHz | |
| 3D Scanning Sonar | BV5000-1350 | 3D mapping |
| Underwater Manipulator | ARM 5E Micro | Underwater working |
| Stereo Camera | ZED | Object Detection & Recognition |
| Main Camera | AXIS | Monitoring |
| Thruster | Model 1020 / Model 1040 | Motion control |
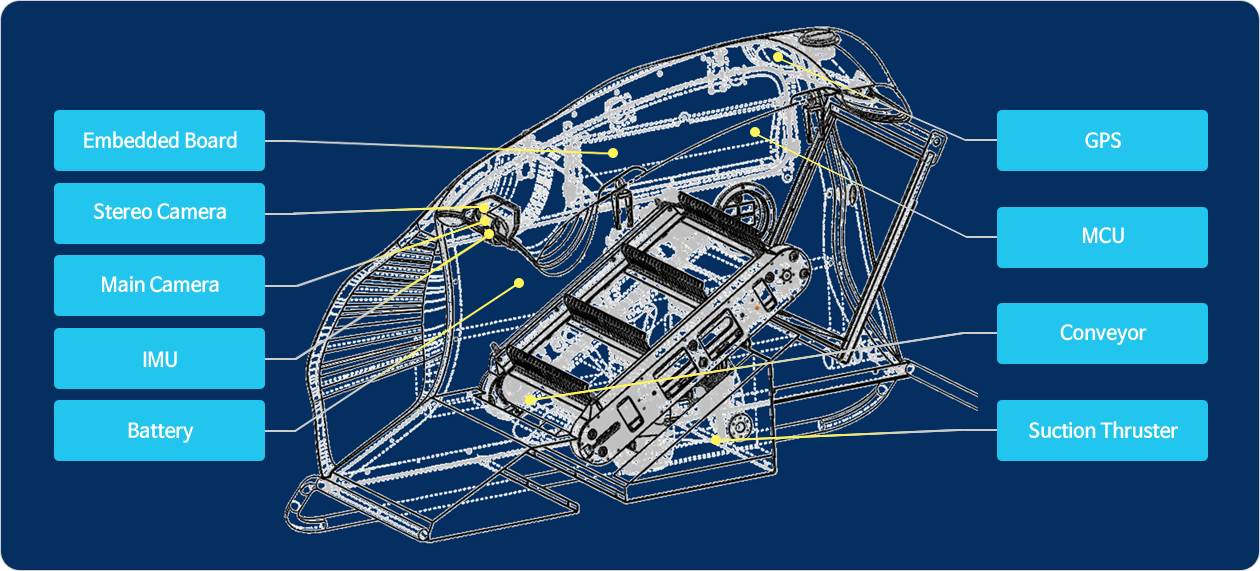
233kg(@air)
FRP (Frame)
24VDC(Li-ion Battery)
2 DoF
FWD 30kgf
WLAN(802.11ac)
| Item | Model | Purpose |
|---|---|---|
| IMU | PNI Targetpoint TCM | Position & Attitude |
| GPS | Septentrio(AsteRX-m2a) | Position |
| Stereo Camera | ZED 2i | Point Cloud |
| Main Camera | CNB NS2100MH/IP | Monitoring |
| MCU | PSOC CY8CKIT-59 | Conveyor& Thruster control |
| Embedded Board | Jetson Xavier AGX | Control Algorithm |
| Thruster | Protruar 1.0 | Motion control & Suction |